


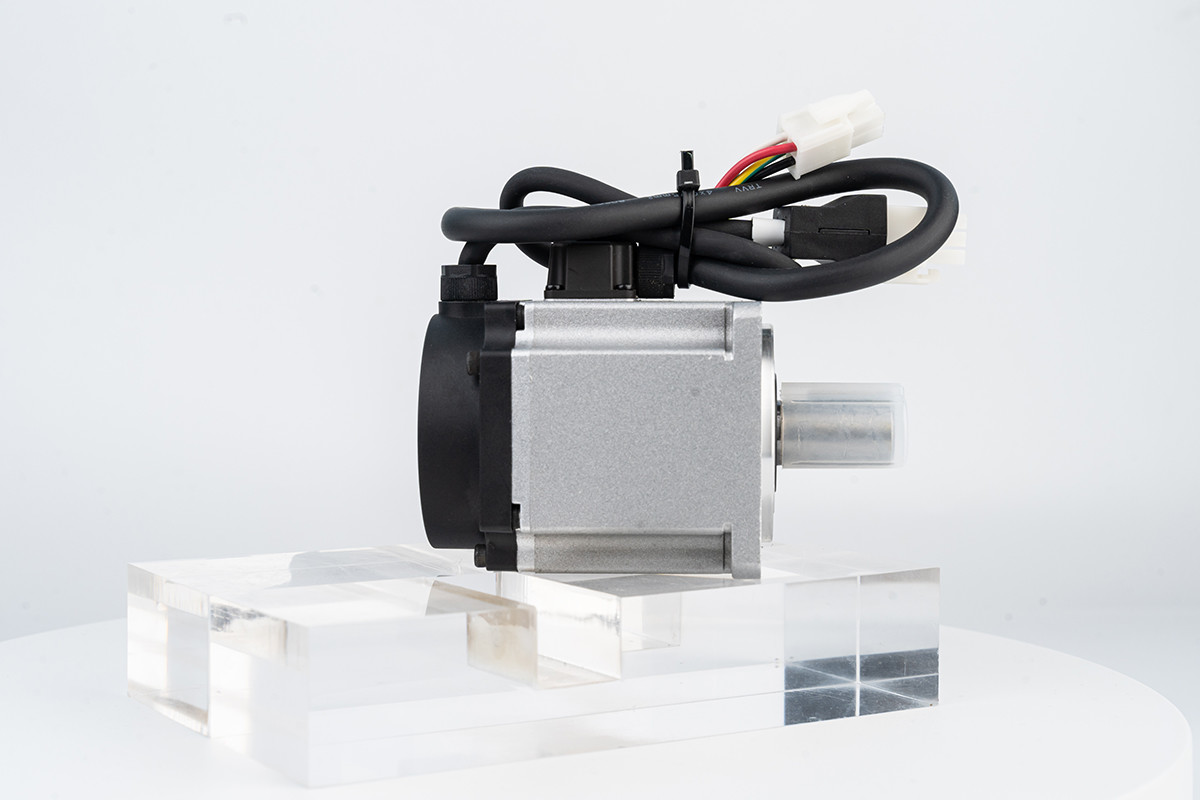
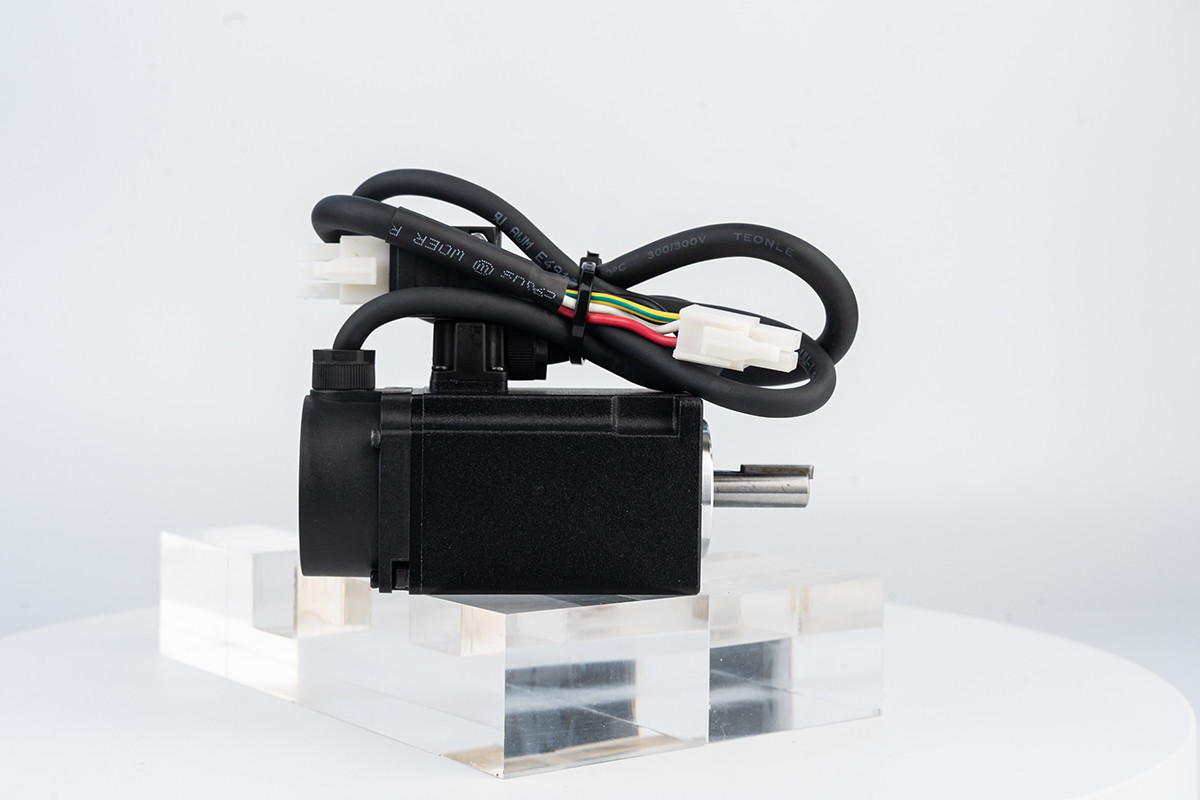
Pulse Type AC Servo System
![]()
Strong internal motion control functions which can realize position, speed,torque,homing controlling modes. It also supports I/O control and standard Modbus RTU protocol. It can replace PLC partly, which helps to save cost.
![]()
Drives Of P100S Series As Example:
![]()
Drives Of P300 Series As Example:
![]()
![]()
![]()
![]()
![]()
![]()
EtherCAT Bus Field AC Servos
![]()
System Wiring Example
![]()
Dimension
![]()
Drive Specification
![]()
In the trend of advocating smart and simple industrial automation, environmentally friendly products, value-added solutions, K-Drive, as one of the world's leading drive manufacturers aggressively investing in R&D, production, and continuous quality improvement, is well positioned to provide its customers with technology-driven, performance-outstanding products such as VFDs, wind power converters, servo drives, HEV/EV drives, helping its customers save energy and increase industrial productivity with sustainability on the one hand, and enhancing their entire value-chain quality, delivery, and services on the other hand.
![]()
| Performance | Common brands | K-Drive |
|---|---|---|
| Applicable motors | Asynchronous motors | Asynchronous /synchronous motors |
| Starting torque | 2.0Hz, 150% (sensor-less vector control) 0Hz, 180% (closed-loop vector control) | 0.5Hz, 180% (sensor-less vector control) 0Hz, 200% (closed-loop vector control) |
| Speed adjustable range | 1:100 (SVC), 1:1000 (VC) | 1:200 (SVC), 1:1000 (VC) |
| Ambient temperature (no derating required) | -10-40ºC | -10-50ºC (for most of the models) |
| Rated input voltage | 208VAC-400VAC | 208VAC-480VAC |
| Communication | Modbus RTU//ASCII | Modbus RTU//ASCII Profibus-DP, CANopen, etc. |
| Position control (fixed length, or angular positioning) | × | √ |
| Field weakening control | × | √ |
| Autotune online | Online | Online & Offline |
| Short-time ramp-up | Trip | No trip |
| Customized features (software and/or hardware) | Unprocurable or no experience | Procurable with rich experience |
In production, rigorous quality control is implemented on components, circuit boards, and the finished goods, assuring products without defects.
![]()
![]()
How to determine the cause of servo error ?
The cause of servo error can depend on various factors, such as the type of servo motor, the application in which it is being used, and the specific error message being generated. Here are some general steps that can help you determine the cause of servo error:
Check the servo motor's documentation: Review the servo motor's manual or documentation to identify common error codes and their meanings. This will provide you with an initial idea of the type of error you are dealing with.
Check the wiring: Ensure that the wiring to the servo motor is properly connected and not damaged. Loose or damaged wiring can cause communication errors between the motor and the controller.
Check the power supply: Make sure that the power supply to the servo motor is stable and meets the motor's requirements. Power fluctuations or insufficient voltage can cause errors.
Check the controller settings: Review the settings in the controller to ensure that they are appropriate for the servo motor's specifications. Incorrect controller settings can cause servo errors.
Check the mechanical components: Check the mechanical components of the servo system, such as the gears and pulleys, to ensure that they are functioning properly. Damaged or worn mechanical components can cause errors.
Test the servo motor: Use a diagnostic tool or software to test the servo motor's performance. This can help identify any issues with the motor, such as faulty sensors or encoder issues.
By following these steps, you can narrow down the cause of the servo error and take appropriate corrective actions to resolve the issue.
























